


Управление шаговым двигателем с помощью платы Arduino.
В этой и нескольких следующих статьях я планирую продемонстрировать, как управлять различными видами моторов.
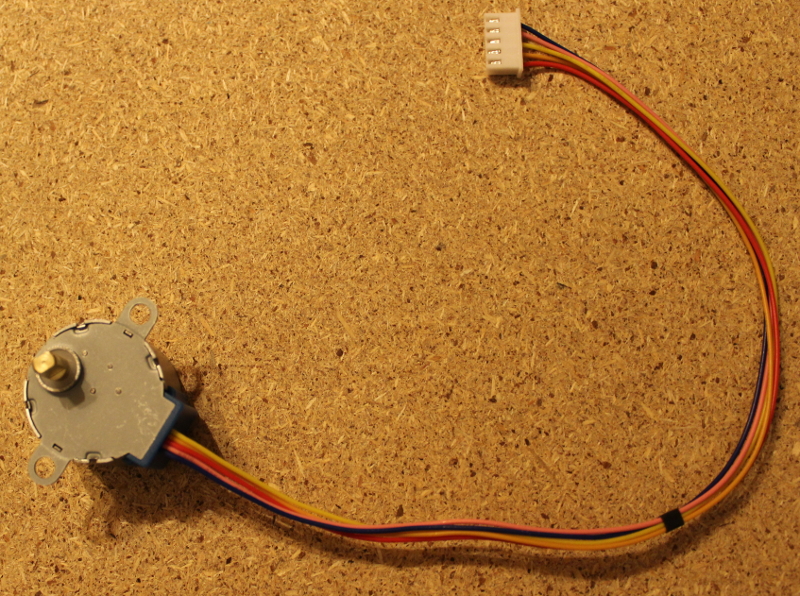
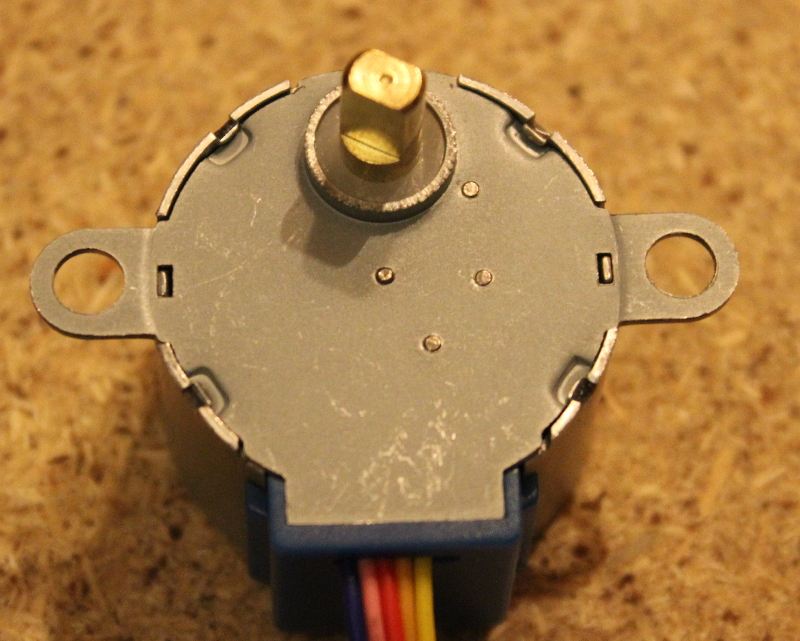
Начнём мы своё изучение с шагового двигателя Step motor 28BYJ-48 (5V).

Этот миниатюрный и довольно дешёвый моторчик, как нельзя лучше подходит для экспериментов и обучения электронным премудростям.
Шаговый двигатель — это двигатель, который может точно перемещаться на минимально возможный угол, называемый шагом. Этот угол обусловлен устройством каждого конкретного мотора.
Преимуществом шаговых двигателей является возможность его неприрывного вращения, подобно двигателю постоянного тока, тогда как сервоприводы, обычно, ограничены углом поворота в диапазоне от 0 до 180°.
Недостатком шаговых двигателей является более сложное управление, чем в случаях с другими типами моторов.
Двигатель данного мотора имеет четыре обмотки, которые запитываются последовательно, чтобы повернуть вал с магнитом.

Получается 4 фазы, поэтому такой электромагнитный прибор называют шаговый 4-х фазный двигатель. Каждый из контактов четырех фаз соединен с красным проводом. Двигатель является к униполярным (однополярным) благодаря схеме соединения фаз. К красному проводу подключается питание. Перемещение вала на шаг происходит под действием импульса тока.
28BYJ-48-5V содержит пластмассовый понижающий редуктор с передаточным числом 64:1.
Основные характеристики мотора:
| Тип мотора | униполярный шаговый двигатель |
| Число фаз | 4 |
| Рабочее напряжение | 5 вольт |
| Угол шага двигателя без учета редуктора |
при 4-ступенчатой последовательности (шаговый режим) 11,25 ° (32 шага на оборот), при 8-ступенчатой последовательности (полушаговый режим - рекоммендован) 5,625 ° (64 шага на оборот) |
| Передаточное отношение редуктора | 64:1 |
| Количество шагов вала мотора за один оборот |
в 4-ступенчатой последовательности 32 x 64 = 2048 в 8-ступенчатой последовательности 64 x 64 = 4096. |
| Cкорость вращения |
номинальная 15 об/мин, максимальная 25 об/мин |
| Подключение | 5-выводов (к контроллеру двигателя) |
| Частота | 100 Гц |
| Сопротивление по постоянному току | 50 Ом ± 7%(25°C) |
| Частота под нагрузкой | > 600 Гц |
| Частота на холостом ходу | > 1000 Г |
| Крутящий момент | > 34.3 мН*м (120 Гц) |
| Момент самопозиционирования | > 34.3 мН*м |
| Стопорящий момент | 600-1200 г*см |
| Тяга | 300 г*см |
| Сопротивление изоляции | > 10 МОм (500 В) |
| Класс изоляции | A |
| Шум | < 35 дБ (120 Гц, без нагрузки, 10 см) |
| Вес | 30 г |
Для того, чтобы заставить двигатель вращаться, нужно попеременно подавать напряжение на его выходы в соответствии со следующей картой (для полушагового и шагового режимов):
| Контакт мотора | Фазы для полушагового режима | |||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | |
| Синий | + | + | + | |||||
| Розовый | + | + | + | |||||
| Жёлтый | + | + | + | |||||
| Оранжевый | + | + | + | |||||
| Контакт мотора | Фазы для шагового режима | |||
| 1 | 2 | 3 | 4 | |
| Синий | + | + | ||
| Розовый | + | + | ||
| Жёлтый | + | + | ||
| Оранжевый | + | + | ||
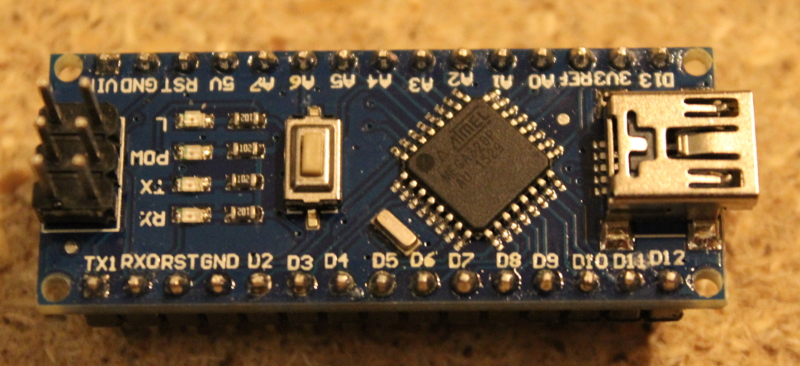
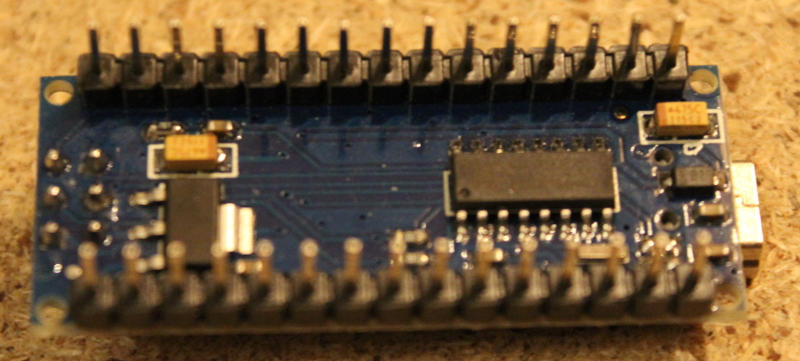
Для управления мотором будем использвать компактную плату Arduino NANO.
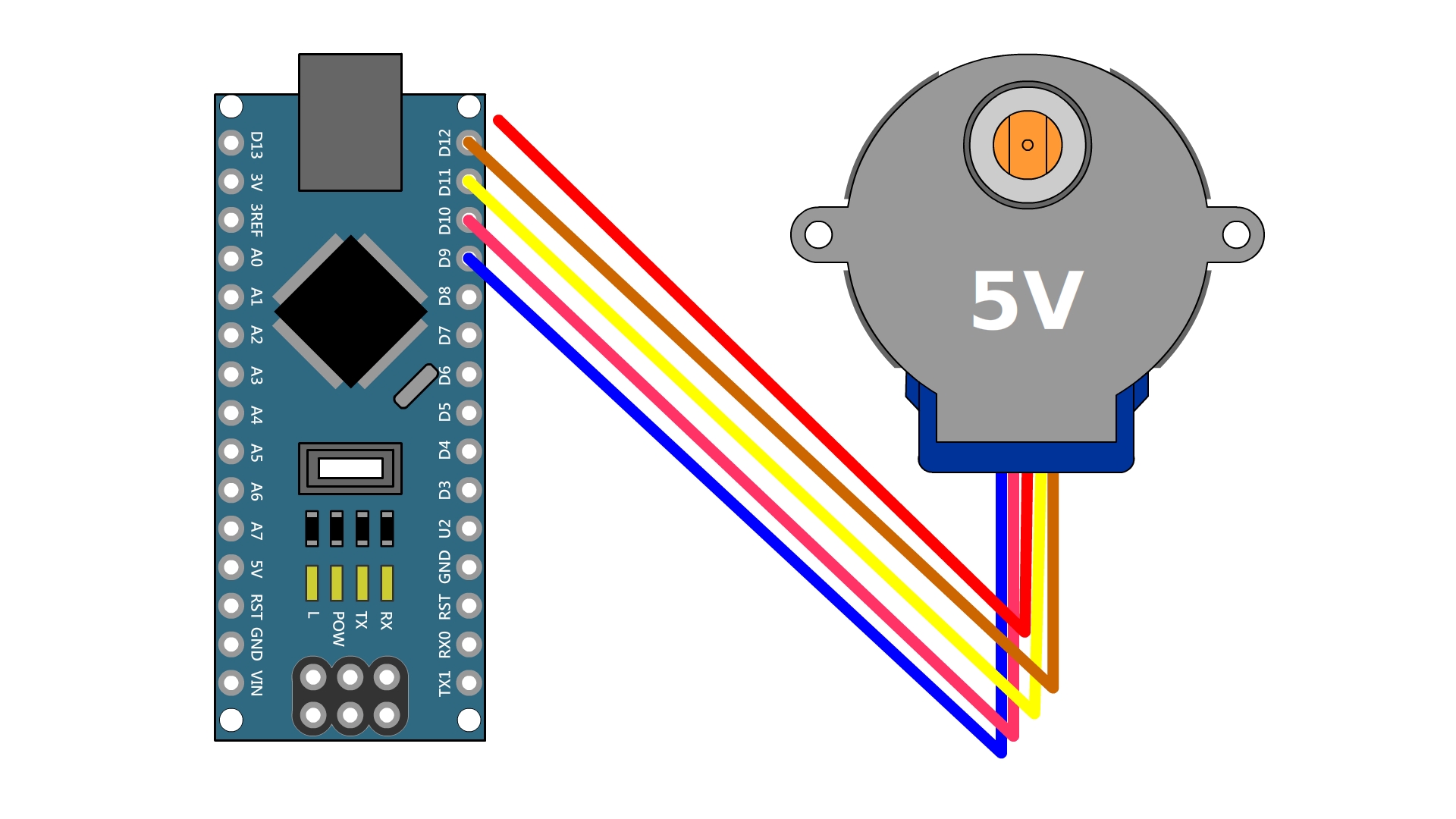
Подключение мотора напрямую к Arduino.
Подключаем 4 провода, кроме красного, к разъёмам платы Arduino: синий — D9, розовый — D10, жёлтый — D11, оранжевый — D12.

Схема соединения:
Открываем среду разработки программ под Arduino, указываем тип платы «Arduino Nano» в «Инструменты → Плата». Правильно указываем процессор «Инструменты → Процессор: «ATmega328»».
Соединяем плату Arduino с компьютером, указываем нужный порт «Инструменты → Порт» и пишем программу, которая сначала делает полный оборот мотора по часовой стрелке, затем против.
Код программы.
|
/*Программа для шагового двигателя 28BYJ-48 (5V). Двигатель делает полный оборот в одну сторону, затем в другую*/
/*У данного мотора 4 провода (син., розов., жёлт., оранж.), которые мы подключаем к контактам ардуино. Номера контактов int MotorPins[4] = {9, 10, 11, 12}; /*Целочисленная константа, показывающая количество фаз подачи сигналов для одного шага мотора. Для полушагового режима - 8 /*Целочисленная константа, показывающая задержку в миллисекундах между фазами подачи сигналов мотору. Для полушагового режима - 2, /*Целочисленная константа, показывающая задержку в миллисекундах между переходами к вращению в другую сторону*/ /*Целочисленная константа, показывающая количество шагов, которые должен выполнить двигатель за полный оборот на 360 град. /*Целочисленная переменная, показывающая количество шагов, которые выполнил двигатель в одном направлении*/ /*Целочисленная переменная, показывающая номер текущей фазы*/ /*Целочисленная переменная, показывающая направление вращения мотора: 1 - по часовой стрелке, -1 - против*/ // Для полушагового режима /*Массив, в котором указано какие сигналы подавать на контакты мотора в той или иной фазе. [фаза][контакт]. Контакты даются в порядке, перечисленном в массиве MotorPins - оранж., жёлт., розов., син. 0 - нет сигнала, 1 - есть сигнал*/ /*Функция CheckLastPhase проверяет не вышел ли номер текущей фазы за пределы размера массива MotorTurnPhases, который определяется переменной OneTurnPhasesCount и не пора ли поменять направление вращения*/ //Увеличиваем шаг на 1 //проверяем не совершил ли мотор полный оборот /*Функция, в которой происходит инициализация всех переменных программы*/ /*Функция-цикл в которой задаётся поведение программы*/ /*подаём напряжения на контакты мотора соответственно фазе, заданной в массиве MotorTurnPhases*/ //переходим к другой фазе // Пауза между фазами |
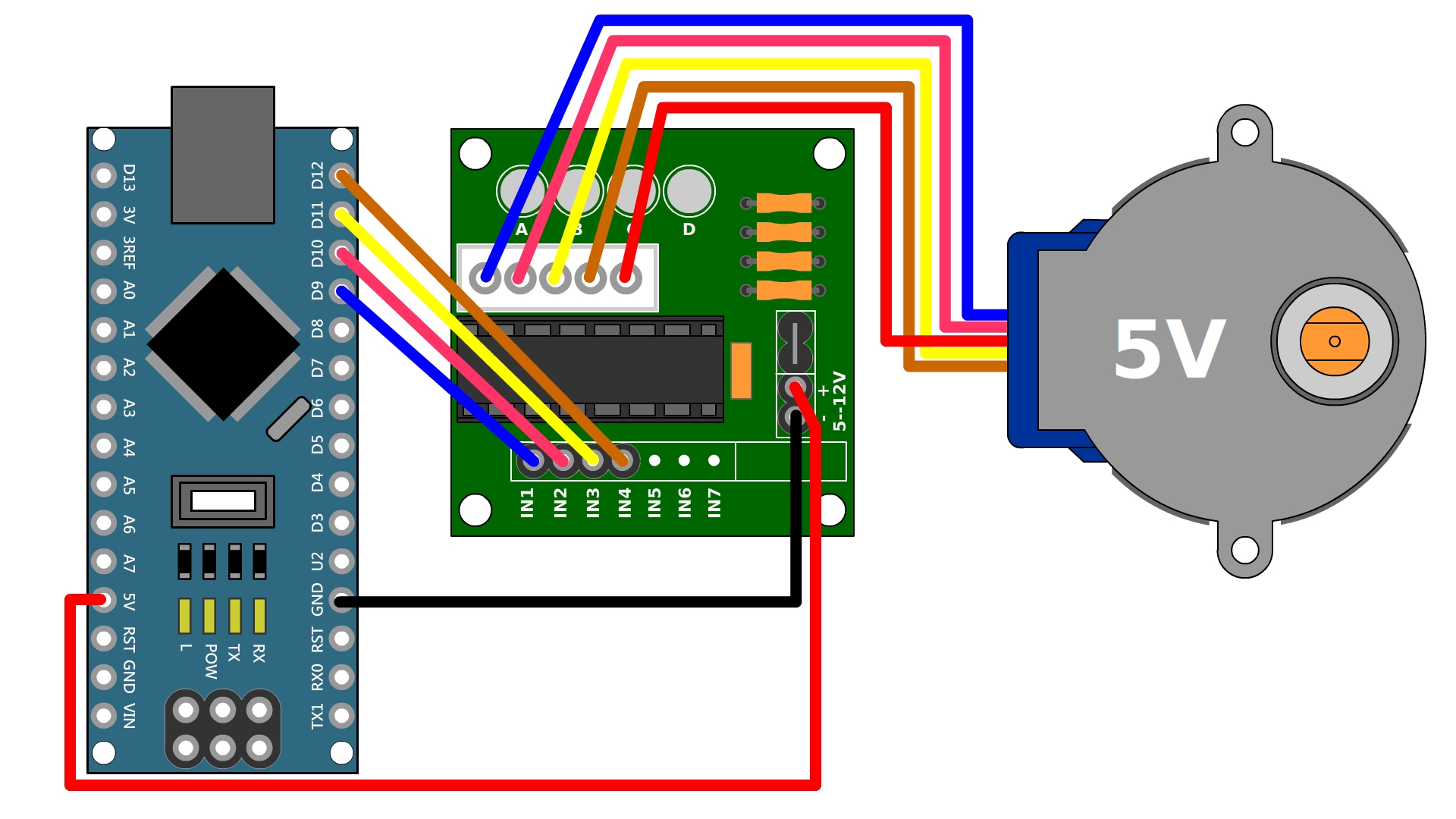
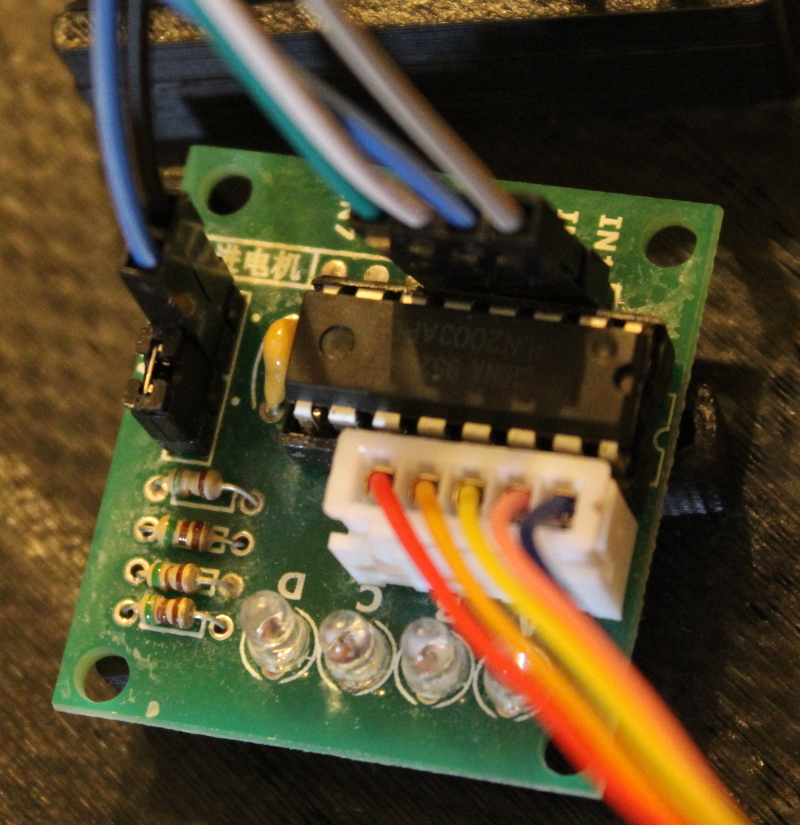
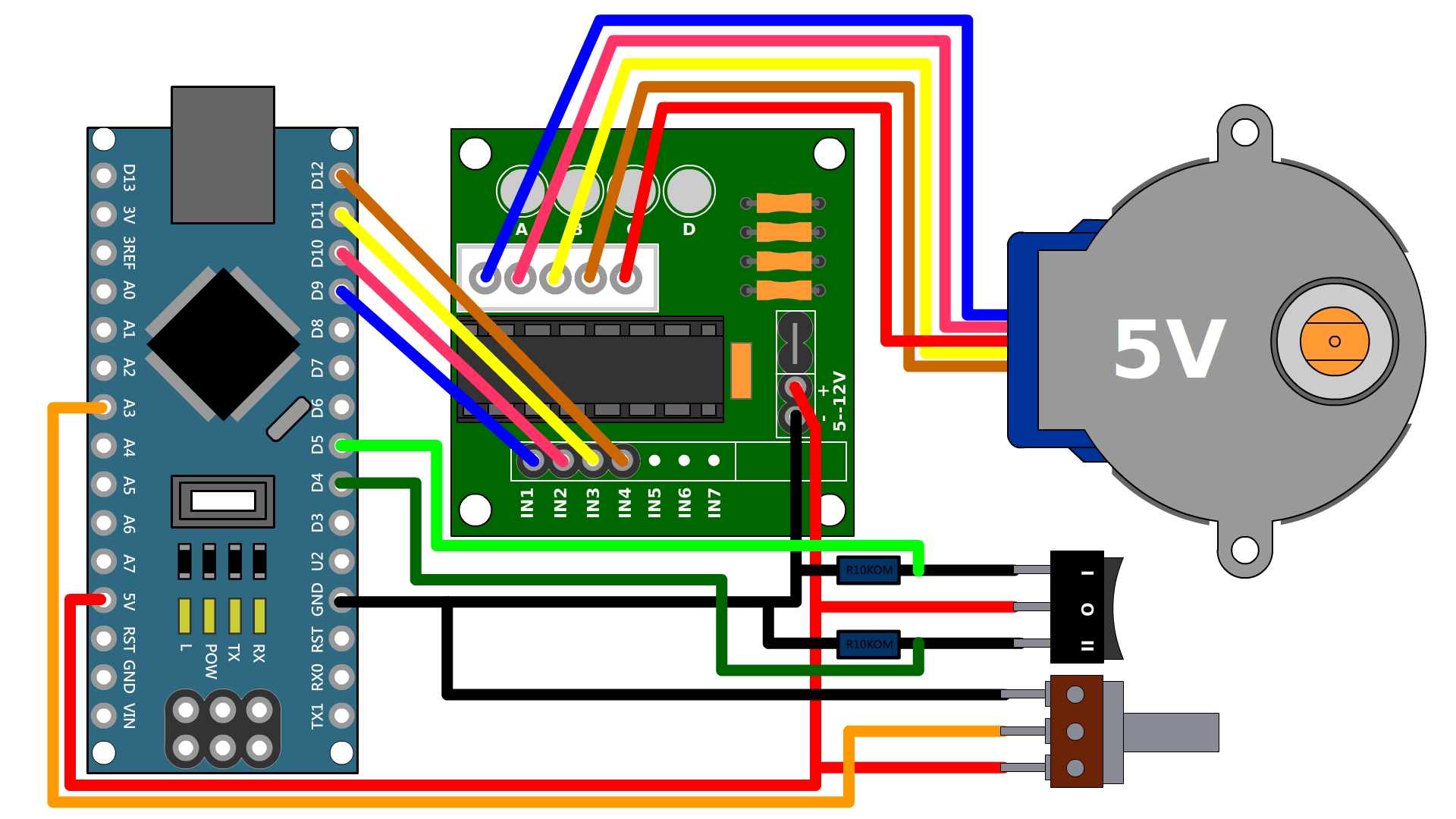
Если мы имеем дело с другими, моторами, требующими напряжение более 5В, то нужен дополнительный драйвер. Обычно, вместе с мотором 28BYJ-48 поставляется модуль SBT0811, содержащий микросхему ULN2003.

Он позволяет управлять мощными нагрузками с током до 500 мА и напряжением до 12 В на канал с помощью слабого тока микроконтроллера, такого как Arduino.
Плата содержит 4 контакта IN1-IN4, которые следует соединить проводами с контактами платы Arduino. От них будут поступать управляющие сигналы с микроконтроллера.
Белый разъём на плате — для подключения мотора.
Два контакта: «- + 5-12V» - это выводы для подключения внешнего источника питания от 5 до 12В. В нашем случае, источником питания будет сама плата Arduino NANO, так как наш мотор питается от 5V. Поэтому эти два контакта драйвера мы подключаем к 5V и GND разъёмам на плате Arduino.
Четыре светодиода на плате — это индикаторы шага, показывают на какой из четырёх проводов мотора подаётся напряжение.
Схема соединения такая.
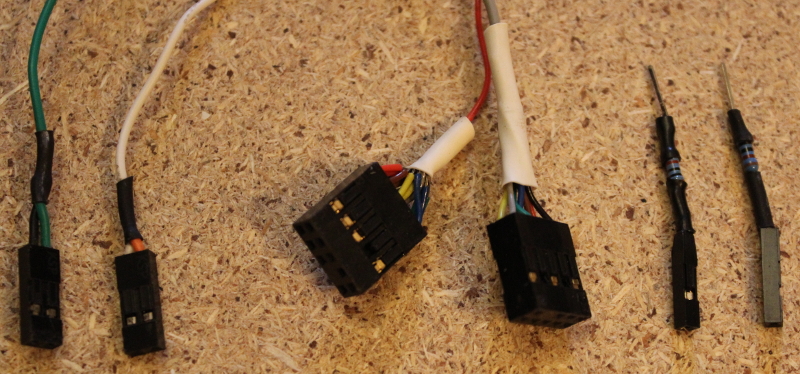
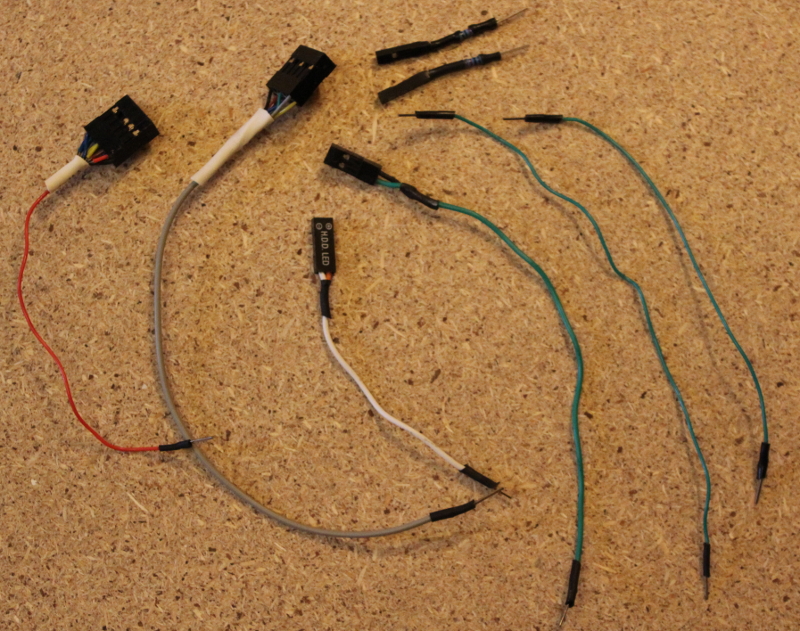
Для того, чтобы её собрать воспользуемся такими, заблаговременно подготовленными проводочками, у которых на одном конце разъём, на другом штырёк.
Для удобства их присоединения к плате Arduino UNO, воспользуемся пластиковым элементом, напечатанным на 3D принтере, к которому приклеены два ряда контактов попарно спаянные с обратной стороны. В один ряд втыкается плата Arduino, в другой провода.

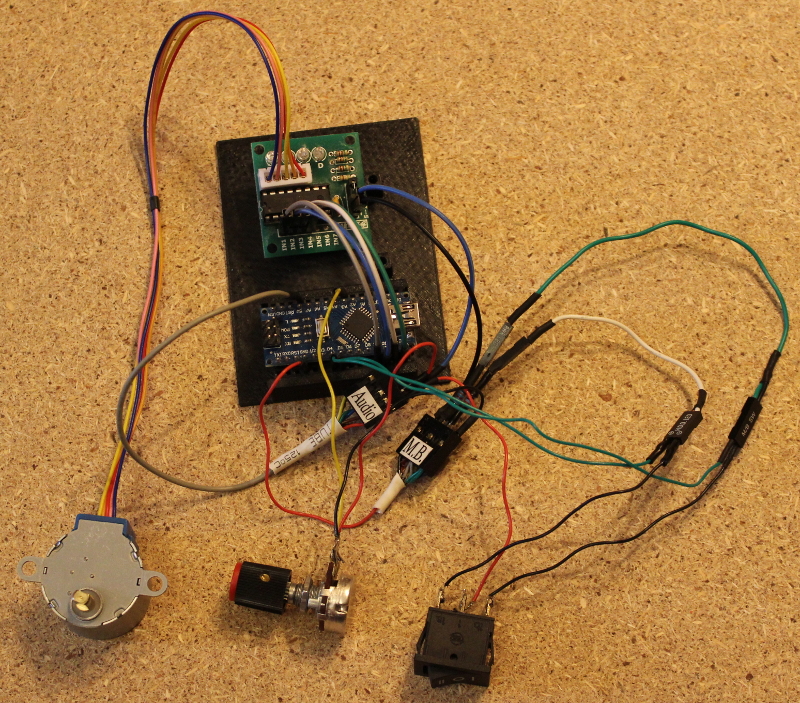
Вот так выглядит наша схема в сборке.

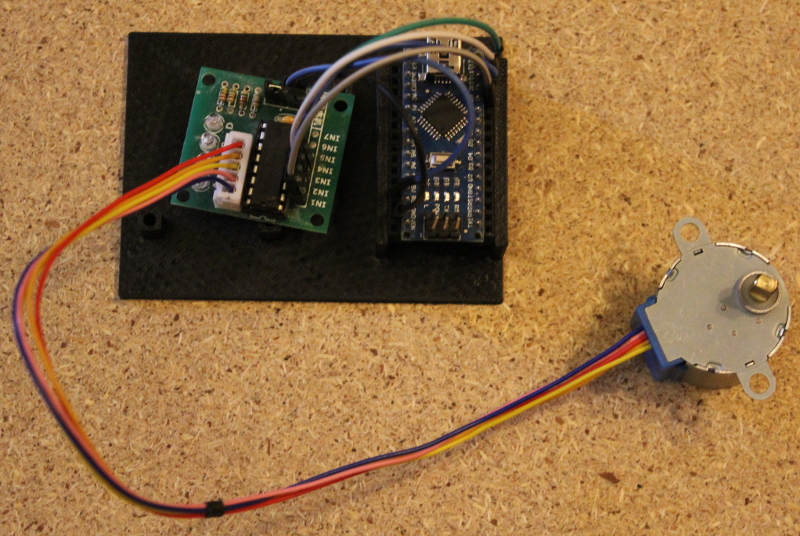
Подключаем питание к плате Arduino с предыдущей залитой программой. Устройство должно работать точно таким же образом, как и в предыдущем примере, с прямым подключением мотора к Arduino.
Если мы имеем дело с, скажем, 9ти вольтовым мотором, то у нас появляется в схеме блок питания на 9V. Тогда, «+» контакт на драйвере, для внешнего источника питания мы соединяем не с платой Arduino, а с проводом питания от блока, по такой схеме:

Добавляем кнопку и потенциометр (переменный резистор) в схему.
Теперь усложним схему и внесём в неё кнопку, которая будет задавать направление вращения мотора и потенциометр, задающий скорость вращения.
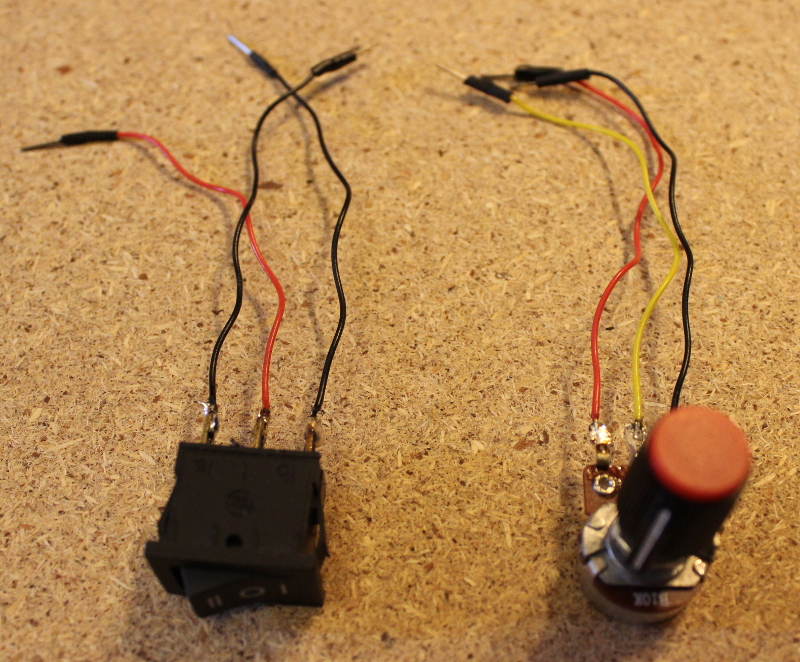
Мы к ним припаяли провода со штырьками.
Для подключения их к плате Arduino, нам понадобятся еще вот такие провода и два резистора на 10 КОМ.
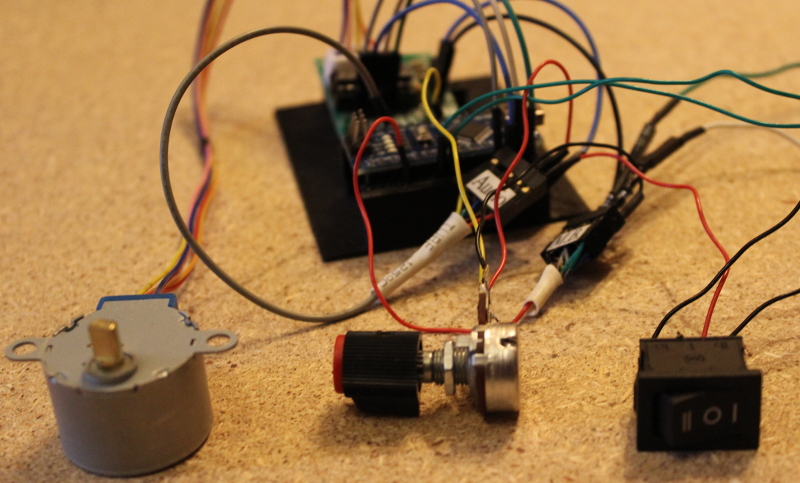
Всё подключаем согласно схеме.
Вот что получилось.
Пишем код программы.
|
/*Программа для шагового двигателя 28BYJ-48 (5V). В схеме есть кнопка и потенциометр. В зависимости от положения кнопки (пол. 1, пол. 2, выключено) мотор вращается либо в одну сторону, либо в другую, либо стоит на месте, а потенциометр влияет на скорость вращения.*/
/*У данного мотора 4 провода (оранж., жёлт., розов., син.), которые мы подключаем к контактам ардуино. Номера контактов указываем в массиве MotorPins, в порядке, соответствующем перечислению цветов, в нашем случае с D12 по D9*/ /*Контакты от двух положений кнопки - цифровые*/ /*Контакт регистрирующий значение потенциометра - аналоговый*/ /*Целочисленная константа, показывающая количество фаз подачи сигналов для одного шага мотора. Для полушагового режима - 8 /*Целочисленная переменная, показывающая задержку в миллисекундах между фазами подачи сигналов мотору. Для полушагового режима - 2, /*Целочисленная переменная, показывающая номер текущей фазы*/ //состояние кнопки включено-выключено /*Целочисленная переменная, показывающая направление вращения мотора: 1 - по часовой стрелке, 0 - против*/ /*целочисленная константа, показывающая временную задержку между считыванием состояния кнопки и потенциометра*/ /*Целочисленная переменная показывающая, сколько прошло времени и не пора ли считывать состояние кнопки*/ //Для полушагового режима /*Массив, в котором указано какие сигналы подавать на контакты мотора в той или иной фазе. [фаза][контакт]. Контакты даются в порядке, перечисленном в массиве MotorPins - оранж., жёлт., розов., син. 0 - нет сигнала, 1 - есть сигнал*/ /*Функция, в которой происходит инициализация всех переменных программы*/ pinMode(ButtonOn1, INPUT); /*Функция-цикл в которой задаётся поведение программы*/ if(ButtonState != 0) /*подаём напряжения на контакты мотора соответственно фазе, заданной в массиве MotorTurnPhases*/ //переходим к другой фазе // Пауза между фазами CurrentButtonDelay += TurnPhasesDelay; /*Функция CheckLastPhase проверяет не вышел ли номер текущей фазы за пределы размера массива MotorTurnPhases, который определяется переменной OneTurnPhasesCount*/ /*функция, в которой проверяется текущее состояние кнопки*/ //считываем данные с положения кнопки I if(readbuttonparam) //считываем данные с положения кнопки II if(readbuttonparam) /*Проверяем, изменилось ли состояние кнопки по сравнению с предыдущим, и если изменилось, то записываем изменения в глобальные переменные*/ if(TurnDirection != CurrentButtonDirection) CurrentTurnPhasesDelay = map(analogRead(PotenciomData), 0, 1023, 2, CheckButtonDelay); if(TurnPhasesDelay != CurrentTurnPhasesDelay) |
Но всё-таки во имя Красоты нужно довести наше устройство до совершенства, так как большое количество проводов смотрится отпугивающе.
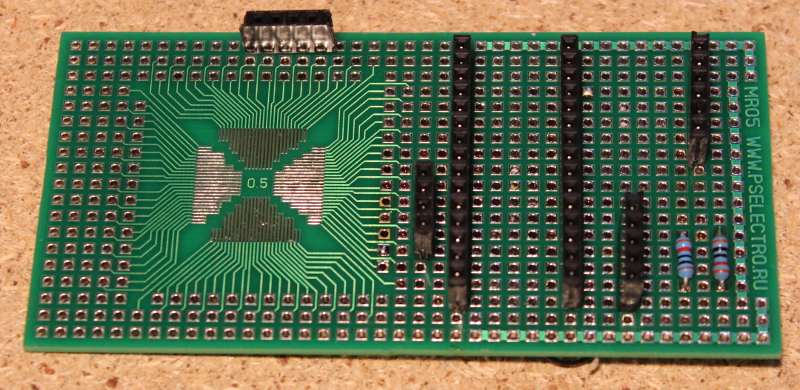
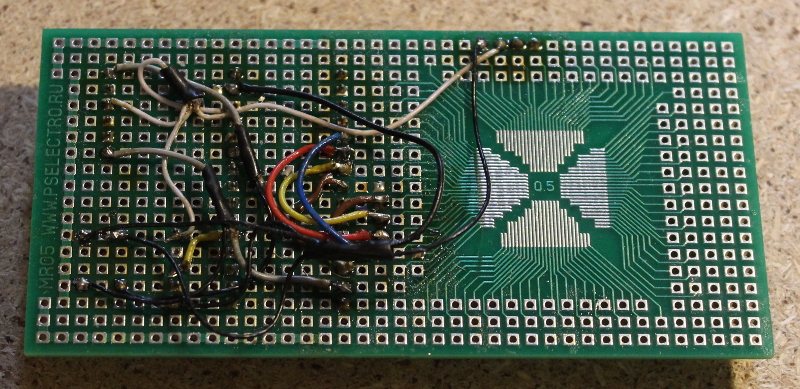
Для этого мы берём вот такую печатную плату, припаиваем к ней контакты для присоединения всех элементов схемы. С обратной стороны всё как нам нужно аккуратно соединяем проводочками.
Затем подсоединяем плату Arduino, драйвер мотора, сам мотор, кнопку и потенциометр на свои места. Проверяем так ли работает наш прибор, как и в предыдущем случае и радуемся, смотря на чудеса современной техники.
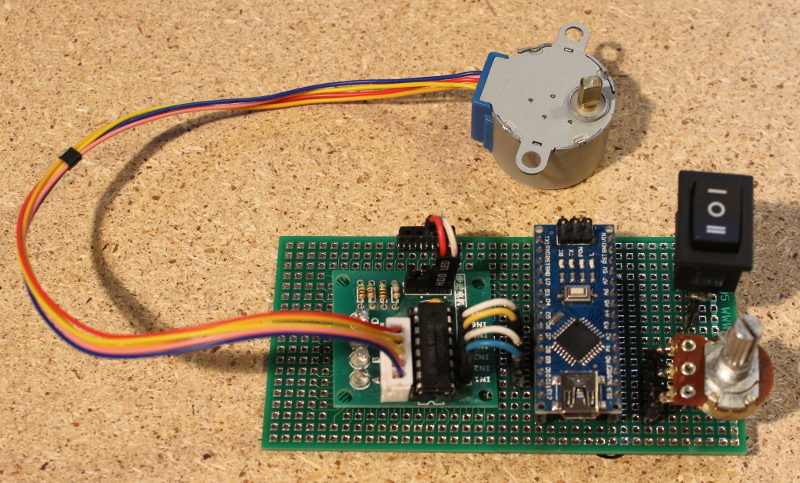
Удачных вам экспериментов!